
| 創澤機器人 |
| CHUANGZE ROBOT |
IROS2019發表的論文“Perception System Design for Low-Cost Commercial Ground Robots: Sensor Configurations, Calibration, Localization and Mapping”提出一個product—ready機器人感知係統,設計穩定並具有長遠性的自動化設備來解決這個問題,包括傳感器的選擇和配置,以及算法和實現。特別地,此低成本係統利用了一個單目相機,一個短程二維激光測距儀,車輪編碼器和慣性測量單元。相對於“最簡單”的設計角度(用最少的傳感器數量實現自動化機器人[1][2][3]),此係統傳感設置相對複雜,但理論上的困難不大。但是,從冗餘傳感和實際應用的角度來看,設置的4個傳感器具有互補性的特點,能夠實現機器人的穩健運行,理論問題極少,故障率也很低。成本方麵,完整的傳感器設備隻需300美元左右(量產時甚至低至100美元),而且我們提出的在線算法隻需要一個現代ARM處理器的一個內核就可以完成。本文的另一個關鍵貢獻是詳細的算法設計和有效的實現,使移動機器人能夠自主移動以進行“在任何地方的應用”。特別是我們提出了一個單步廠內批量校準算法,能夠有效、準確地校準傳感器的內部和外部參數;通過緊密耦合的傳感器融合實現的定位算法,用於執行區域探索、重新定位和傳感器在線校準;映射算法,生成精確的混合地圖,用於商用機器人的長期部署。該文在算法設計上,並沒有把重點放在“數學新穎”,而是從“係統設計”上下功夫,推動低成本商用機器人走向現實。
1、相關工作
根據機器人傳感器係統和算法的設計,相關工作可以分為兩類:一類是依靠數量最少的傳感器(一個或兩個)[1][2][3][4][5],另一類是使用多個傳感器的,類似於我們的傳感器,但有其自身的局限性[6][7][8][9]。
A. 具有最少(1-2個)傳感器的係統
在機器人係統中使用的各種傳感器中,攝像頭(RGB相機或深度相機)和激光測距儀(單光束或多光束)是最受歡迎的傳感器,通過這些傳感器設計出了各種自主的算法。這些傳感器可以支持機器人在適當的環境下完全自主。例如,攝像頭在3-30Hz下可以提供對周圍環境的密集感知,其感知信息可用於進行3D SLAM[2][10]。攝像機在體積、成本和功率方麵的優勢使其易於集成到不同類型的機器人,甚至是微型機器人中[2]。深度攝像機也可以作為機器人的主要傳感器,提供定位、繪圖、避障等功能[5][11]。與深度相機相比,LRF通常具有更大的視野(FOV)和更長的感應距離,因此也被廣泛應用於商業機器人[1][4]。此外,由於近年來MEMS技術的發展,相機往往與IMU集成在一起。這使得機器人在劇烈運動或挑戰性的環境下,具有更好的比例估計能力,同時也有更好的係統穩定性[3][12][13]。類似地,LRF傳感器也可以借助於IMU,實現性能的提升[14]。研究人員還致力於將IMU與車輪編碼器集成在一起,在缺乏外在感受器的傳感器長期使用,而產生不可避免的漂移時,產生準確的死角估計[15]。
B. 帶有冗餘多傳感器係統的係統
目前,自動駕駛是最具挑戰性的機器人研究項目之一,通常情況下,自主駕駛汽車會配備精確但昂貴的GNSS-INS係統、數十台雷達傳感器、多個RGB攝像頭和多個多光束LRF [6]。為了使類似級別的自動駕駛汽車更具有經濟性和可行性,開發出了依靠相機和3D感應LRF的係統,以代替昂貴的GNSS-INS係統[7][16]。在這些係統中,3D感應LRF要麼采用成本較高的多光束LRF,要麼采用旋轉2D LRF,但其應用在商業機器人時也有其自身的局限性(如旋轉轉子的價格和生命周期、機器人工業和結構設計的挑戰等)。要開發地麵機器人,車輪編碼器是低成本但高效的傳感器。然而,大多數利用車輪編碼器的係統隻關注於具有平坦表麵的環境[9][8]。紅外和超聲波傳感器在機器人係統中也得到了廣泛的應用。雖然它們可以用於定位和測繪,但由於精度和分辨率較低,主要用於避障[17]。本文提出了我們的機器人感知係統設計,由攝像頭、單光束LRF、IMU和車輪編碼器組成。這樣的係統成本較低,可以保證在大多數常見的環境下(“任何位置”)的穩健性能。這些都是上述任何一種係統無法同時實現的目標。
2、傳感器的配置分析
傳感器配置和討論 機器人傳感器可分為兩種類型:本體感覺傳感器(測量機器人自身的運動)和外部感覺傳感器(感知周圍環境)。為了發揮其互補的感知能力,機器人通常配備本體感受和外感傳感器。
1)本體感覺傳感器。
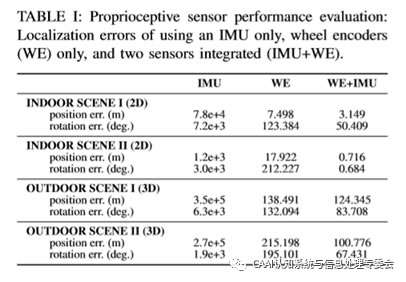
由於IMU和車輪編碼器具有互補性,因此本設計集成了IMU和車輪編碼器。IM/U可以測量高幀率(≥100Hz)下移動框架的角速度和比力(重力影響的局部線性加速度),其測量結果可用於描述機器人在3D空間中的運動。雖然IMU在機器人應用中得到了廣泛的應用,但由於其性質,即使與其他傳感器融合,也有一定的局限性。有幾種情況會導致運動估計失敗。例如,機器人靜止、以恒定的圓周速度或直線速度運動等[3][18]。此外,由於IMU不能直接獲得線性速度估計,當機器人在具有挑戰性的環境中導航時,迭代估計器的本地化估算值可能會始終落入局部最小值,從而導致估計性能低下,甚至出現發散[19]。然而,這些挑戰都可以通過集成車輪編碼器來克服,因為車輪編碼器直接提供速度估計。另一方麵,車輪編碼器隻能對機器人在二維平麵上的運動進行表征。這些互補的特性使IMU和車輪編碼器成為一對完美的本體感知傳感器,而且它們的成本都很低。
表I顯示,當IMU和車輪編碼器融合在一起時,運動估計效果顯著提高。
2)外窺式傳感器
一種短距離低成本的2D LRF和一個單目攝像頭通過設計集成。基於視覺的機器人係統可以在其捕獲的圖像包含足夠多的靜態的、可區分的信息(例如,稀疏的特征點[12]、半密集點雲[10]、CNN特征等[20])時成功地工作。雖然大多數情況下如此,但仍然有很多環境不符合這個假設,尤其是建築物內部和跨建築物的環境(黑暗的環境、場景少、移動物體多、光照條件變化等)。另一方麵,LRF具有較大的FOV(200-360度),並且在光照條件下具有很強的魯棒性,並具有豐富的環境特征。低成本的LRF的弱點是檢測範圍短(不能用於室外導航)、無法捕捉3D信息、噪聲大。前兩個問題可以通過相機很好地彌補,而第三個問題可以通過基於概率估計的傳感器融合來改善。
3)完整的設計
眾所周知,本體感知傳感器和外部感知傳感器提供的信息是互補的,因此兩者的集成可以提高機器人感知係統的性能。因此,我們在設計機器人時,將上述傳感器一起設計,即攝像頭、LRF、IMU、車輪編碼器。構建機器人感知係統需要考慮好的另一個關鍵因素是傳感器與傳感器的剛性連接和精確的時間同步。雖然可以設計算法來在線估計時空校準參數[12],但可能會影響係統性能,引入使用風險,因此我們把這一點作為對製造商的強烈要求。
3、實驗與結果
結果表明,在室內和室外場景中,部署的“IMU和車輪編碼器融合”比其他替代方案有很大的優勢。在室內,平均定位誤差為5cm左右,室外為35cm左右。此外,還進行了全自動機器人係統的實驗。搭載感知係統的機器人可以通過帶有規劃和控製模塊的預定路徑,進行自主導航。2019年2月14日-24日期間,在阿裏巴巴西溪園區內進行了共計84次測試,室外總行程16.7公裏(見圖2)。在測試過程中,僅有一次失去本地化時進行了人為幹預(這是由於我們的軟件不成熟造成的)。通過以上對比,可以看出所提出的方法的有效性。另一方麵,當執行同樣的任務時,甚至在一天內多次需要人工幹預[8]。此外,當運行在Nvidia Jetson TX2上時,所提出的定位算法隻占用一個ARM內核(相當於A73),並且達到優化操作平均35毫秒,而平均關鍵幀頻率低於5Hz。這表明所提出的方法可以很容易地在低成本的處理器上實時運行。
 |
|
| 資料獲取 | |
| 新聞資訊 | |
| == 資訊 == | |
| » 國標《智慧城市 智慧多功能杆 服務功能與 | |
| » 人工智能之數據挖掘2020年第9期 | |
| » 噴霧消毒殺菌機器人 | |
| » 中國通信學會發布《全球人工智能基礎設施戰 | |
| » 創澤集團受邀參加工信部 AI 精準賦能中 | |
| » 人工智能案例 依圖科技:不斷崛起的AI | |
| » 2020年麵向人工智能新基建的知識圖譜行 | |
| » 破解AI工程化難題,AI中台助力企業智能 | |
| » 淺析我國消防機器人發展現狀與趨勢 | 山 | |
| » 【華為出品】智能體白皮書2020 | |
| » “先行示範•智贏未來” 創澤 | |
| » 創澤集團牽頭起草的全國首個《應用於滅菌消 | |
| » 創澤集團智能機器人新品發布會!多款自主研 | |
| » 人工智能人才發展報告:亞太地區創新與招聘 | |
| » 創澤集團智能機器人“創創”受邀參加進博會 | |
| == 機器人推薦 == | |

服務機器人(迎賓、講解、導診...) |
|

智能消毒機器人 |
|

安防巡檢機器人 |
|

人工智能垃圾站 |
|
| == 信息推薦 == | |
|
|
 |
| 機器人招商 Disinfection Robot 消毒機器人公司 機器人應用 智能垃圾站 消毒機器人價格 消毒機器人廠家 機器人政策 教育機器人 迎賓機器人 機器人開發 清潔機器人 消毒機器人 講解機器人 安防巡檢機器人 霧化消毒機器人 紫外線消毒機器人 地圖 |
