1、論文背景
機器人可以為殘疾人或老年人的日常生活提供極大幫助,比如說機器人輔助穿衣。然而穿衣過程中,用戶上肢的突然動作可能導致穿衣任務的失敗,甚至為用戶帶來危險。使用視覺傳感器實時追蹤用戶上肢運動(user posture tracking)非常困難,因為衣服和機器人都對用戶造成了遮擋。例如,使用開源骨骼追蹤框架(OpenNI Skeleton Tracker [1])和深度學習方法OpenPose [2],均無法實施準確的追蹤用戶上肢運動。
為了解決上述問題,我們提出了一種多傳感器信息融合的人體骨骼實時追蹤方法。本文研究主要包括以下三點:第一,我們通過高斯隱變量模型(Gaussian Process Latent VariableModel,GP-LVM),將運動上肢的高維運動映射至低維度的隱變量空間中(latent space)。該空間可以針對不同用戶的不同上肢殘疾特點,建立個性化用戶輔助模型(personalized user model)。第二,我們在隱變量空間中使用貝葉斯網絡(Bayesian networks),該網絡融合了機器人和用戶之間力的信息,以及機器人末端位置信息,進而實時追蹤人體上肢運動。第三,我們使用層級多任務控製(hierarchical multi-task control),使機器人既可以基於力的信息自動改變運動軌跡從而保證用戶安全,又可以完成穿衣任務。
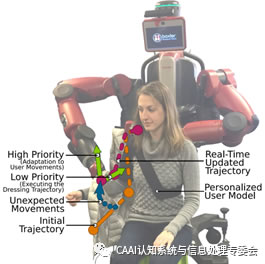
圖1 Baxter機器人輔助殘疾人穿衣
2、係統概述
如圖2所示,我們要求健康用戶穿著繃帶來模擬上肢殘疾情況。我們將采集用戶上肢隨機運動的數據,將其映射至二維隱變量空間中建立個性化用戶模型。在該二維空間中,我們采用基於概率的粒子濾波方法(particle filter),完成多傳感器信息融合(機器人與用戶間力的信息,機器人末端執行器位置信息),從而實現用戶上肢運動的實時準確追蹤。在我們之前的研究中 [3], 我們將機器人穿衣動作描述為兩個層級任務:高層級任務即機器人根據力的信息調整運動軌跡,從而實時減小用戶的受力情況,確保用戶的舒適與安全;低層級任務即通過PD控製完成從瘦-肘-肩關鍵的穿衣軌跡,該軌跡由本文的用戶上肢追蹤方法實時更新。
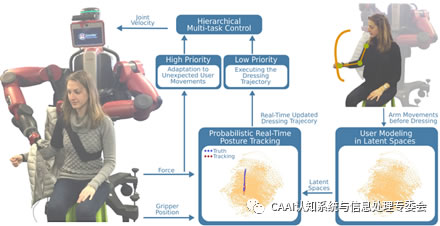
圖2 係統概括圖
圖3展示了完整的穿衣過程。當用戶在穿衣過程抬起胳膊時,機器人也相應改變軌跡來減少受力情況,並實時運行至新的肘關節和肩關節位置。

圖3 機器人穿衣過程
圖4 展示了在低維隱變量空間內粒子濾波的過程。我們根據力和位置的信息為每個粒子賦予新權重,從而循環更新。圖中顏色越淺代表權重越高。
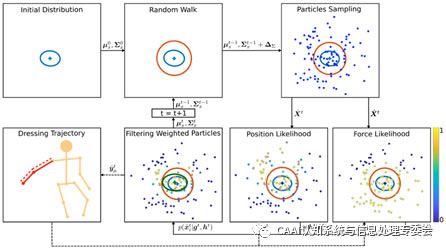
圖4 低維隱變量空間內粒子濾波
3、實驗分析
本文首先對隱變量空間個性化用戶模型進行分析,如圖5所示。該模型有一下3個特點:第一,該模型可以描述不同用戶的不同上肢殘疾特點。圖5裏麵不同顏色即代表不同殘疾情況的運動空間;第二點,低維空間極大減小了粒子濾波的計算量;第三點,該個性化模型權衡了用戶殘疾上肢運動的可達性 (reachability) 和用戶偏好(preference)。
本文還進行了一些列對比試驗,其中包括了與隻用視覺方法追蹤的誤差比較,如圖6所示。本文所提出的方法產生了3.3cm的誤差,是視覺追蹤誤差的六分之一。
本文在20名用戶上完成了相關實驗測試。每個用戶進行50次試驗並模擬不同的殘疾類型,如圖7所示。
4、分析與結論
本文提出了一種利用多傳感器信息在低維隱變量空間中實時追蹤用戶運動的方法。該方法為在物理人機交互(physical human-robot interaction)中,當人體運動被嚴重遮擋而無法用單一視覺信息完成追蹤的問題,提供了一種解決方案。
參考文獻:
[1] http://wiki.ros.org/openni_tracker
[2] Cao, Zhe, et al. "Realtimemulti-person 2d pose estimation using part affinity fields." Proceedingsof the IEEE Conference on Computer Vision and Pattern Recognition. 2017
[3] Zhang, Fan, Antoine Cully, andYiannis Demiris. "Personalized robot-assisted dressing using user modelingin latent spaces." 2017 IEEE/RSJ International Conference on IntelligentRobots and Systems (IROS). IEEE, 2017.
 |
- 創澤智能機器人
- 中國智能服務機器人領軍企業,涵蓋商用、家庭、特種等多用途的智能機器人產品體係,十幾年行業應用解決方案提供商
|
|
在下肢外骨骼機器人的穩定性評估、步態規劃和平衡控製中,人機係統質心是重要的參數之一
多台貨箱到人機器人正在運行,攜帶著貨箱輕巧敏捷地來回穿梭於存儲區和工位之間,高速完成美妝產品的存揀作業。這是業內首個多層貨箱到人機器人解決方案的落地應用,相較同等麵積的人工倉,效率提升2.5倍。
基於計算機視覺的智能識別技術 和SLAM定位技術的引入,則實現了目標與用戶的動態精準識別和交互。能夠輔助課堂教學,提升遠程教學和溝通效率,營造場景化教學新體驗
配送機器人綜合了SLAM、智能導航避障、多機調度、人機交互等人工智能技術,為餐廳、酒店、樓宇等廣泛場景提供配送機器人解決方案,在高動態的商業環境下精確建圖和定位,實現高效運行,降低企業成本
高精度機器人操控的五類方法:(1)基於傳感信息的方法(2)基於柔順機構的方法(3)基於環境約束的方法(4)基於感知約束集成的方法(5)仿生的方法
機器人商業落地案例YOGO ROBOT,YOGO與寶山區政府合作,打造機器人智慧樓宇集群。
新一代下肢康複外骨骼機器人自主研發,可以實現無拐杖輔助下平地行走、跨越障礙、轉彎以及上下樓梯等場景,幫助穿戴者釋放上肢負擔,擴大運動範圍、增加平衡性和安全性
國外外骨骼機器人的研究早於國內,商業化水平也高,我國是繼美國、以色列和日本之後,第四個成功研發外骨骼機器人的國家











