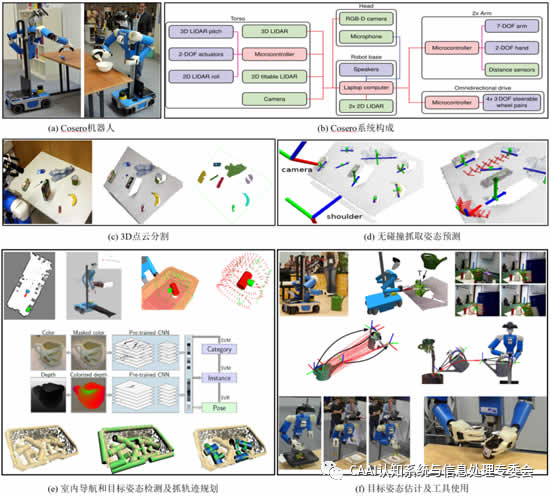
Cosero[1]是德國波恩大學的Sven Behnke團隊根據家庭環境中的日常操作任務而研製的一款仿人操作機器人(如圖1(a)(b))。機器人底部配備了四輪獨立轉向行走機構,以便在靈活的通過狹窄通道,上部配備了兩個7自由度機械臂已完成擬人的操作,並在夾持器末端裝有紅外測距傳感器已達到對抓取目標的距離探測,在頂端安裝有Kinect相機,以實現對目標環境的3D感知。Cosero通過底盤的激光雷達進行導航和定位,采用法線估計和場景分割相結合的方法對目標進行3D點雲分割,采用無碰撞抓取方法[1]對目標物體進行抓取(如圖1(c)(d))。在論文[2]中,作者運用Cosero進行零件分揀搬運實驗,通過2D激光雷達導航到作業點,通過RGB-D相機對目標進行識別分割,規劃抓取路徑和抓取姿態估計(如圖1(e))。在論文[3]中,作者采用深度學習方法對目標進行姿態估計,並完成了提壺灌溉,人機交互和使用工具等複雜任務(如圖1(f))。Schwarz[4]介紹了Cosero基於深度學習方法的目標姿態估計和RGB-D SLAM等感知測量。
機器人的學習分為三個部分的軌跡預測包括示教者的手部運動軌跡、示教者的身體移動軌跡以及被操作物體的運動軌跡
通過2D激光雷達信息采用Hector SLAM實現機器人對地圖的感知和自主導航規劃,通過頂部的RGB-D相機采集目標物體深度和RGB圖像信息
驅動係統由4個200W無刷直流電機構成,通過50:1的空心軸減速機可以最高達2m/s的速度在玉米、高粱等農作物的地裏前進
視頻搜索是涉及信息檢索、自然語言處理(NLP)、機器學習、計算機視覺(CV)等多領域的綜合應用場景
服務機器人潛在危險有:電擊、與能量有關的危險、著火、與熱有關的危險、機械危險、輻射、化學危險等
HRI的MTL可以使機器人更輕鬆,更智能地與新用戶進行交互,即使使用諸如RL這樣的數據密集型方法,也可以避免社交交互失敗的不利影響。MTL和多模態ML已用於自動識別自閉症譜係障礙(ASD)兒童
從大型仿人機器人整機構型國內外研究現狀入手,圍繞機器人整機構型、關節運動特點、伺服驅動器、減速器、仿真平台等方麵進行深度講解,最後就大型仿人機器人整機構型未來發展趨勢給出自己的見解
智能機器人視覺方麵的工作,主要體現在感知、理解、學習及推理4個方麵,涉及到目標檢測、目標追蹤、人體姿態估計、人臉識別、行為識別、推理等技術
基於康複機器人內部傳感器識別記錄訓練過程中的運動學參數,能夠實時定量評估不同的運動模式,還能夠掌握患者是否主動參與訓練等情況
「Vision+Ask」的任務包含視覺問題生成、根據問題生成查詢、圖像描述等;「Vision+Answer」的任務包含視覺問答、視覺對話等
對於聯邦學習技術,數據應用推廣的經驗,並深入探討聯邦學習在政務,醫療,金融,廣告,物流的應用價值,以期為數據應用價值的釋放帶來解讀和參考
DeepTech通過科研數據分析、專家訪談等方式洞悉先進計算領域發展趨勢,探尋具備技術顛覆性,有商業化前景的先進計算技術,提煉出 2022 年先進計算技術及應用七大趨勢





