
| 創澤機器人 |
| CHUANGZE ROBOT |
人工智能的進步使機器人擁有越來越強大的社交能力,這些機器人表達了我們對改善日常生活的希望。然而,我們的期望與社交機器人現實之間仍然存在嚴重的落差。對人機交互中神經認知機製的理解有利於優化人機之間的社交接觸。為了實現這一目標,該領域必須結合人類神經科學(包括便攜式神經成像技術)以探究長期、具體的人機交互問題。發展社交機器人是未來的大趨勢,而人類神經科學研究方式將幫助我們更友好地與社交機器人進行交互和協作。
目前社交已被視為機器人領域目前麵臨的十大挑戰之一[1]。為了促進這一領域的進展,豐富的認知神經科學文獻對人類社會行為提供了重要的見解[2]-[4]。
CellPress期刊近期發表的論文“Social Cognitionin the Age of Human–Robot Interaction”闡述,與機器人互動時研究人的大腦將有助於更清晰、更深入地了解人機交互,從而為社交機器人的春天奠定基礎。關注這些交互作用的人為方麵,包括考慮社會認知,這有助於突出人類神經科學在方法和理論上的最新進展,可以促進人與機器人流暢的交流。在考慮人機交互的神經認知機製時,我們建議關注社會認知的表現形式,以及這些表現形式在與實際存在的機器人進行持續交互過程中是如何變化的。此外,微創移動神經成像技術為加深對人機交互的人性方麵的理解提供了特別的幫助。這些方法通過將社會維度整合到人與這些機器的交流中來加速人與機器人的交互研究,有助於推動創造真正的社交機器人。
1、在與機器人交互過程中人類大腦成像的起源
人們創造機械的起源可以追溯到上古時期,古希臘和中國古代的作家們發明了類人機器人來充當充當工人和仆人。在過去的一個世紀中,最能激發人類想象力(以及對研發投入)的自動機類型是機器人。與機器人技術的發展同步的是人腦成像技術的出現和快速發展。這項技術對於增進我們對支持人類社交行為的神經認知機製的理解至關重要。最近,人機交互和神經科學領域開始交叉,在與社交機器人交互過程中為社交認知提供了新的視野,有開創性的研究調查了對機器人的運動、動作觀察以及注意力等。這些研究展示了所涉及的大腦成像方式的多樣性以及早期人機交互研究中的技術進步,並為這些交互作用的神經認知觀點提供了一個起點。
該領域的一項初步研究[5]探討了動作觀察網絡(AON)的靈活性,得出的結論表明,該網絡的頂葉,運動前和中顳葉皮質的部分對觀察人類抓握和操縱物體都有反應。這些發現得到了腦電圖(EEG)研究的證實,該研究表明無論是對機器人還是人類,其在感覺運動或AON區域都有抑製作用[6]。過去的腦成像研究表明,人類在觀察機器人[7]表達情感以及機器人與其他人的互動時,確實表現出了人的感知網絡(PPN)的參與。當觀察人類和機器人在模擬疼痛時,或試圖破譯機器人[2]的意圖時,可能會出現類似大腦的反應,這種情況仍然是一個活躍的研究領域。
2、最先進的人類神經科學方法研究人機交互
在將人類神經成像技術應用於研究人類與機器人在接近自然的社會互動環境中的互動方麵,人類神經科學研究取得了重大進展。這些研究不僅進一步闡明了人類在感知和與機器人交互時社會認知的適應性和局限性,而且還闡明了機器人專家在研發越來越多的社交機器人時麵臨(並將繼續麵臨)的一些挑戰和機遇。
最近的兩項功能性磁共振成像(FMRI)技術研究強調了將神經科學、機器人和現實世界的互動結合起來,共同推進社會認知和社交機器人學領域的發展。第一項研究為未來的社會神經科學研究鋪平了道路,在測試大腦反應的同時,將社會互動與自主因素結合起來[8];另一項研究考察了長時間與一個手掌大小、愛玩耍的機器人科茲莫(Cozmo)進行社交的程度,這些人觀察到同一個機器人“處於痛苦中”時,會產生共鳴反應。這項工作為研究與機器人的長期互動對社交神經認知過程的影響奠定了基礎。
綜上所述,目前神經科學對人機交互的研究結果強調了機器人是如何成為探測核心特征(動作、情感、意圖)以及人類大腦中社會認知處理有用工具。雖然已經取得了重大進展,但在現場捕捉和表征大腦反應的方麵,與機器人的持續互動仍處於非常早期的階段。如後文所述,可能是未來探索和開發最富成果的領域之一。
我們應該如何探索人機交互的神經認知現實? 在感知或與機器人互動時,使用功能磁共振成像(FMRI)和腦電圖(EEG)測得的神經反應,在不同的大腦網絡中差異很大。一般來說,當人們觀察社交機器人和其他人工智能體時,人類知覺網絡(PPN)內的活動不會減少,而思想理論網絡內的活動會減少。除了神經激活程度的差異外,未來在這一領域的研究將通過映射我們與機器人接觸時的社會認知神經表征並描述這些表征隨時間的變化。
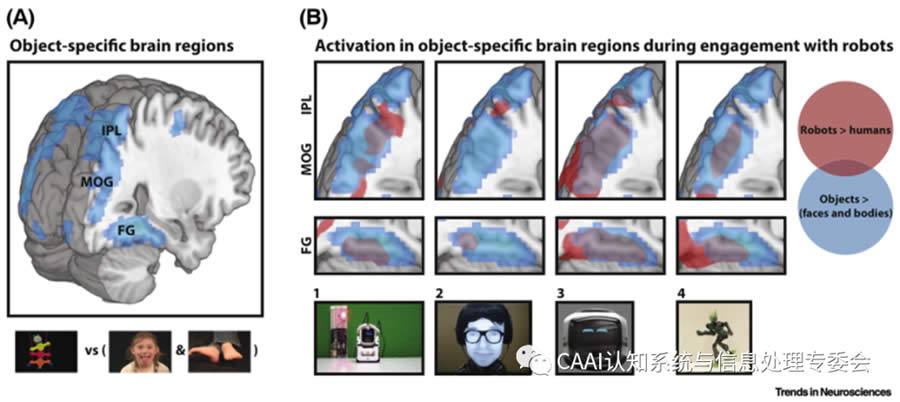
許多研究人類如何感知機器人並與之交互的研究都集中在思想理論網絡和PPN上。然而,新的證據表明,當我們與社交機器人互動時,包括下頂葉在內的其他大腦區域起著關鍵作用(圖1)。
為了確定機器人在我們的社會環境中可能占據的位置,我們需要測量與有生命的對象(如人類或寵物)以及物體(如電話)之間的(不)相似性。這些問題的答案不僅會促進我們對人們如何看待社交機器人發展的理解,而且還涉及到哲學、認知科學和法律,它們對整個社會都有重要的影響(如道德和倫理)。
3、了解與社交機器人的真實互動
基於屏幕的實驗、第三人稱觀察以及與機器人的一次性或短期互動,已經提供了與這些新型智能體接觸的社會認知過程的關鍵見解。為了讓這個領域向前發展,未來的研究應該研究在生態環境中與機器人的真實和長期的互動。這些研究將為探索人類大腦如何在現實世界中與這些物體進行相互作用提供非常必要的依據。
總體而言,社會神經科學領域仍然需要考慮第二個人在互動中的重要性[9]。這個挑戰對於研究我們與社交機器人的互動尤為重要。幸運的是,已經有數項研究開始關注機器人(或與之交互)的影響,這些影響涵蓋了更廣泛的機器人設計和形態[10][11]。通過整合從行為(例如,言語和眼睛注視)和生理學(例如,呼吸和神經活動)獲得的信息,開始探索人機交互的神經認知方麵[12][13]。
在社會認知的背景下,當與機器人互動時,需要考慮的是機器人的目標群體,以及這些互動的目的。社交機器人的兩個主要目標人群是兒童和老年人,而神經科學和心理學的參與者樣本主要是年輕人,並且往往偏向於社會的特定部分(例如,受過教育和較高的社會經濟地位)。
4、移動腦成像技術在人機交互研究中的應用前景與誤區
移動神經成像技術的新發展為機器人如何在社會層麵產生共鳴提供了必要的測試基礎。研究人機交互的一種有前景的技術是功能性近紅外光譜(fNIRS)。從最初建立人腦功能和相應的光吸收之間的聯係以來,該技術一直在穩步發展[14]。這種成像方式,就像功能磁共振成像一樣,利用近紅外光譜中生物組織(如皮膚和骨骼)的透明性,繪製了依賴於血氧水平的反應圖[15]。激光二極管或發光二極管照射在頭部的光線穿過頭蓋骨,以香蕉形狀的曲線散射回來,最終被一個距離頭部約3厘米的探測器探測到。fNIRS的局限性與其相對較淺的穿透深度(到達大腦皮層外層)和相對較低的空間分辨率(2-3cm)和時間分辨率(高達10hz)有關。它比功能磁共振具有更低的空間分辨率和比腦電圖成像慢的時間分辨率,但具有成本低、便攜性好和相對穩定的優點。
這些優勢使移動式和無障礙的神經成像成為可能,因此fNIRS被認為是進行具體的人機機器人實驗的最佳侯選,特別是對於代表性不足的群體,例如兒童,患者和老年人,他們通常無法參與數據采集。人機交互研究人員已經將fNIRS作為構建反饋回路以控製機器人運動或行為的工具,並將其作為對各種機器人係統的隱式響應評估[16]-[18]。
從使用基於屏幕的社交機器人評估的實驗,到使用fNIRS測量與實體機器人的無限製真實世界交互,應該是一個漸進的過程,逐步增加複雜性(圖2)。
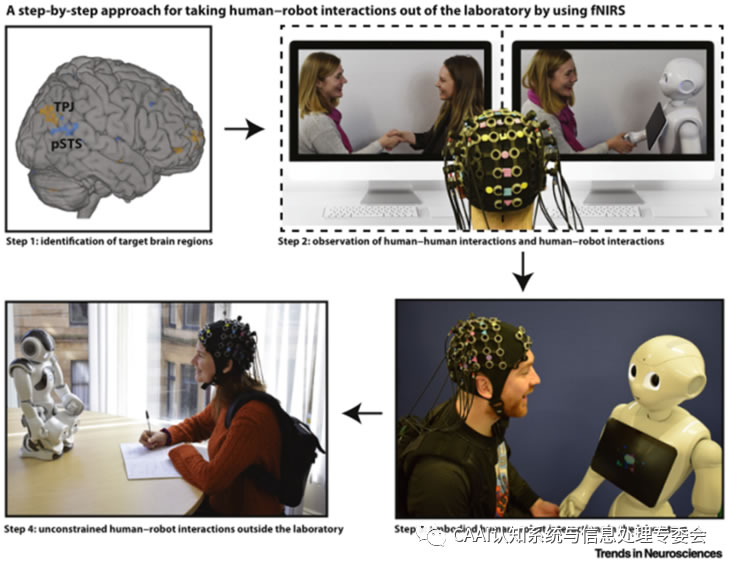
在現實世界中,可以采用逐步的方法來實現實驗室之外的不受約束的人機交互。第一步是識別與社會認知過程相關的大腦區域,如之前的發現;隨後,基於屏幕的研究探索了這些區域在觀察人人和人機交互過程中的參與情況;第三步是在實驗室環境中與機器人進行相對不受約束的交互;最後一步是允許在日常環境(如學校和家庭)中與機器人進行具體交互。每一步的結果都可以為下一步使用的方法和分析提供信息。
5、結束語
以神經科學為基礎的人機交互在改變社交機器人技術領域取得了重要進展,同時也加深了我們對人腦的理解。除了在基於屏幕的實驗中感知機器人外,最近的研究發現在與機器人的實時、具體交互中采用更複雜的分析方法,可以幫助我們對社會認知的核心機製進行更深入的了解。基礎人類神經科學研究的另一個好處是,它也將為下一代社交機器人的開發和設計提供信息,這些機器人最終可能成為提供支持和護理的社交夥伴。然而,神經科學對人機交互的貢獻僅十多年,目前還存在一些問題,例如:(1)人腦複雜的神經機製如何支持我們與這些的奇怪機械同伴的互動?(2)隨著機器人越來越深入地融入我們的社會生活,社會認知的表現如何隨著時間的推移而改變?結合人類神經科學和社交機器人學的未來研究成果,將為未來與在社會層麵和我們產生共鳴的自主機器人一起生活做好準備。
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |


