

安檢作為現代化社會治安中最重要的領域之一,是嚴峻複雜的社會治安形勢目標下的普遍選擇。
目前,市麵上提供的機器人底盤種類很多,除了成本外,其自身的硬件方麵也有許多問題:
1. 雙輪差動型底盤:它本身不能旋轉,轉向時的半徑,速度、角速度都是靠內外驅動輪之間的速度差來實現轉向。這種底盤對地麵平整度要求較高,而且負重量小。
2. 雙舵輪型底盤:機器人運行中經常需要兩個舵輪差動,這對電機和控製精度要求較高,而且因為四輪或以上的車輪結構,容易導致一輪懸空而影響運行,所以對地麵平整度要求嚴格。
3. 履帶式底盤:速度相對較低,且運動噪聲較大,能耗是室內輪式的4—5倍。救援工作本就需要快速及時,速度太慢影響救援進度,且能耗過大會使機器人工作效率降低。
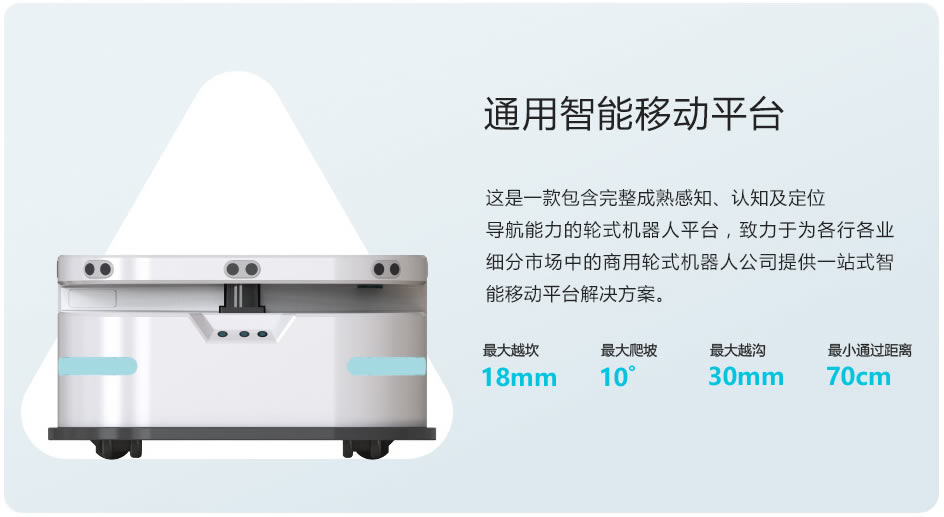
創澤機器人底盤機身靈活,適用範圍非常廣,不僅有完善的定位導航能力與路徑規劃能力,還能夠適應狹小的環境,麵對複雜、狹窄的室內空間非常擅長,可以搭載不同的軟硬件滿足各種類的服務機器人開發需求。

擁有強大的識別感知與分析判斷能力,利用激光雷達+超聲波雙重導航方式讓定位與導航更加精準,穩定性更強。即使在未知的環境裏也能夠實現定位於高精度建圖,輕鬆覆蓋每一個角落。
創澤自主研發的通用室內外移動機器人底盤,提高自主移動機器人的環境適應能力,滿足室內、室外巡檢機器人的功能需求,同時開放底層接口,用戶可以進行二次開發;可用於教學科研,係統設計采用模塊化思想,便於係統的改進與重組。

 |
| 商用機器人Disinfection Robot展廳機器人智能垃圾站輪式機器人底盤迎賓機器人移動機器人底盤講解機器人紫外線消毒機器人大屏機器人霧化消毒機器人服務機器人底盤智能送餐機器人霧化消毒機機器人OEM代工廠消毒機器人排名智能配送機器人圖書館機器人導引機器人移動消毒機器人導診機器人迎賓接待機器人前台機器人導覽機器人酒店送物機器人雲跡科技潤機器人雲跡酒店機器人智能導診機器人 |



