

機器人底盤承載著機器人定位、導航、移動、避障等多種功能,TA的出現,不僅節省了開發時間和成本,而且加快了產品的研發速度,是機器人必不可少的重要硬件載體。
那麼如何選擇一款好的機器人底盤?
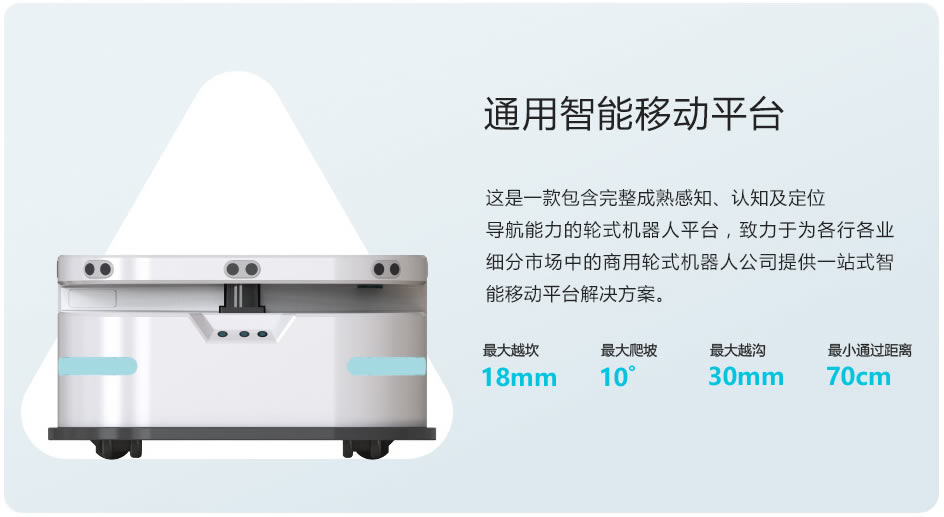
1. 底盤性能:導航方式(激光、磁條、二維碼等),底盤尺寸大小、負載要求、越障能力和功率大小。
2. 環境因素:室內外運行,通道寬度、是否需要過門or電梯,是否有專用通道,地麵材質狀況,坡度與地麵間隙大小,環境溫濕度等
3. 其他要求:定位精度要求,工作時長等。
4.越障能力:越障和避障能力機器人底盤性能中的核心性能,關乎到後期機器人的行走姿態和工作效率。
5.拓展性高:開發接口,二次開發,模塊化設計
6.操作性強:操作簡便,穩定性高,後台管理。
7.價格:好用不貴,才有市場
8.售後服務:配套後續開發服務
創澤機器人底盤是一款室內通用的服務機器人底盤,可用於開發巡檢機器人、消毒機器人、配送機器人、測溫機器人等,產品性能可靠穩定。且創澤機器人擁有成熟穩定的生產能力、供應鏈,讓創澤擁有很大的價格優勢,並支撐客戶大批量的落地生產。
 |
| 商用機器人Disinfection Robot展廳機器人智能垃圾站輪式機器人底盤迎賓機器人移動機器人底盤講解機器人紫外線消毒機器人大屏機器人霧化消毒機器人服務機器人底盤智能送餐機器人霧化消毒機機器人OEM代工廠消毒機器人排名智能配送機器人圖書館機器人導引機器人移動消毒機器人導診機器人迎賓接待機器人前台機器人導覽機器人酒店送物機器人雲跡科技潤機器人雲跡酒店機器人智能導診機器人 |



