

運動規劃是移動機器人自主導航係統中的重要模塊之一,相關算法研究成果層出不同窮,諸多學者針對不同應用場景和需求,設計、改進了非常多的運動規劃算法,筆者將常見的運動規劃算法主要分為四類:圖規劃算法、空間采樣算法、曲線插值擬合算法和仿生智能算法。
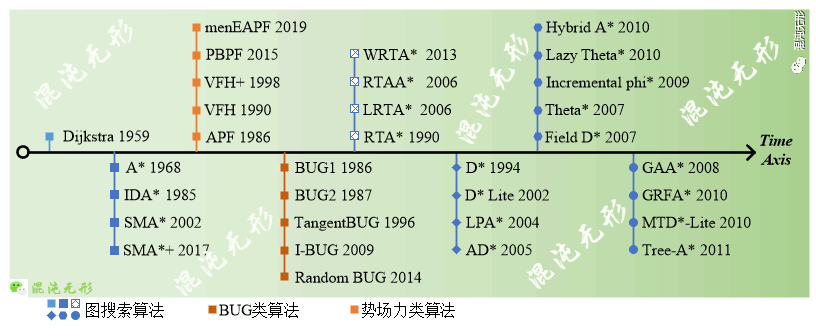
圖規劃算法多數將環境模型離散化表達,如柵格圖等,其離散節點描述相應狀態,建立節點間聯係,並求解最優路徑。
圖規劃算法根據路徑生成方式的不同分為三類,其中以圖搜索算法為主,以及BUG算法和勢場力算法。
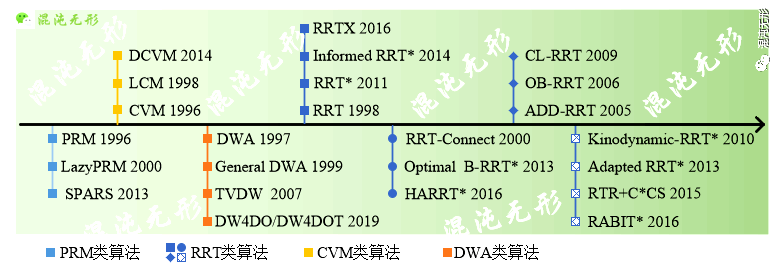
空間采樣算法按照采樣空間不同,可分為:狀態空間采樣和運動空間采樣。
基於狀態空間采樣的算法能夠在大麵積、高緯度的空間中快速生成路徑,包括RRT和PRM類算法等,具有概率完備性,其主要步驟包括隨機采樣、度量連接、碰撞檢測和路徑查詢。
基於運動空間采樣的算法則在速度空間等距采樣,通過評價函數選擇最佳控製指令,驅動機器人運動,主要包括CVM類算法及DWA類算法等。
上述大部分《圖規劃算法》和《空間采樣算法》生成的路徑存在折點、急彎等曲率不連續的情況,影響了機器人運動平穩性,因此需要綜合考慮模型硬約束與實際規劃軟需求,以提升路徑平滑度。
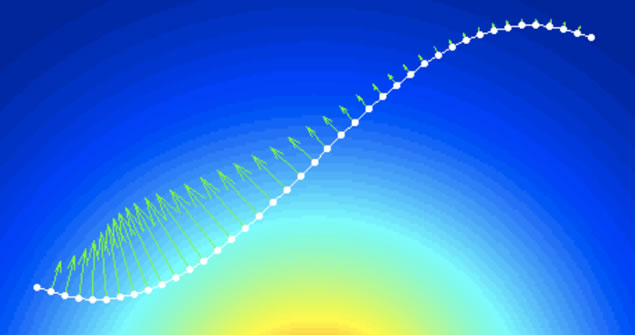
曲線插值擬合算法在曲線平滑控製及優化方麵有顯著的優勢,按照曲線生成方式及其種類可分為:基於插值的規劃算法、基於特殊曲線的規劃算法及基於優化的規劃算法三類,該類算法在自動駕駛等領域有著廣泛的應用。
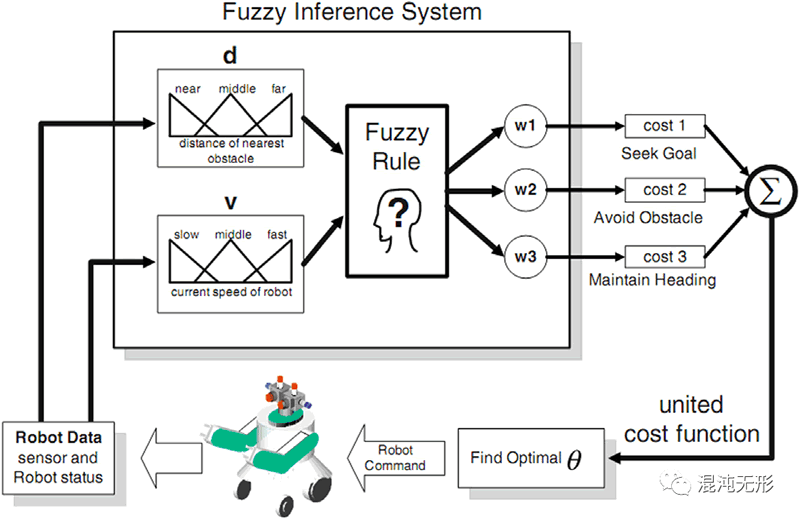
針對機器人運動規劃問題,除上述基於經典模型的規劃算法外(《圖規劃算法》、《空間采樣算法》和《曲線插值擬合算法》),還有神經網絡、模糊邏輯及基於自然靈感的算法(遺傳算法、粒子群算法、蟻群算法等),並逐漸成為研究熱點。
與經典算法相比,智能算法能夠較好適應複雜動態環境中的不確定、不完整的信息,但需要前期學習階段和較高計算成本,適用於大型機器人,如無人車等。
圖規劃算法與空間采樣算法已經能夠在諸多場景下的規劃生成一條無碰撞路徑,實時性和動態適應性逐漸提升,但多數算法仍存在路徑質量差、未考慮動力學約束等問題。
而曲線插值擬合算法正好與之配合,能夠容易生成連續性好的軌跡曲線。
多數仿生智能算法處理動態環境下的規劃問題時存在實時性、收斂性均不穩定等問題,實際應用較少。
從目前研究思路來看,多是先采用圖規劃算法、空間采樣算法生成全局路徑或初始路徑,再使用曲線插值擬合算法,綜合考慮係統軟硬約束,優化生成質量好的軌跡。
 |
| 商用機器人Disinfection Robot展廳機器人智能垃圾站輪式機器人底盤迎賓機器人移動機器人底盤講解機器人紫外線消毒機器人大屏機器人霧化消毒機器人服務機器人底盤智能送餐機器人霧化消毒機機器人OEM代工廠消毒機器人排名智能配送機器人圖書館機器人導引機器人移動消毒機器人導診機器人迎賓接待機器人前台機器人導覽機器人酒店送物機器人雲跡科技潤機器人雲跡酒店機器人智能導診機器人 |



