
| 創澤機器人 |
| CHUANGZE ROBOT |
眾所周知,力量反饋有助於外科醫生使用適當的力度來避免組織損傷,而組織損傷通常是由於觸覺反饋的喪失和無意的過大器械力的副產物[5]。例如,達芬奇手術係統(Intuitive Surgical Inc.,Sunnyvale, CA)是迄今為止第一個手術機器人,也是商業上最成功的手術機器人之一,但它不提供力或觸覺反饋。據報道,在達芬奇機器人操作的手術中,抓握力將通過力反饋顯著降低[2]。利用傳感器測量觸覺信號可以通過增加外科醫生的處境意識來提高手術效率[2],特別是對於高風險的手術來說,如心髒和大腦手術[6]。這種觸覺傳感器應滿足特定的物理和功能要求。比如,像手術鉗和鑷子這樣的手術器械都有很小的下頜。因此,傳感器應小型化,以適合理想的位置。此外,傳感器應能在靜態和動態條件下工作,特別是運動器官,如心髒[7]。
同樣,外科醫生可能需要通過持續施加靜態力來維持組織。這個靜態力在維持期間必須是恒定的。同時,為了避免組織撕裂,力不能超過一個特定的範圍。然而,由於組織的粘彈性,工具-組織相互作用力可能會隨著時間的推移而減小(也稱為應力鬆弛現象),導致組織滑移[8]。另一個例子是在磁共振成像(MRI)下進行手術,這種外科手術要求傳感器具有磁共振兼容性。此外,在一些手術,如心血管微創手術中,傳感器必須是電被動的,避免幹擾的心髒的電活動[6]。
應用於MIS的觸覺傳感器主要是基於電學或光學原理開發的。圖1顯示了基於傳感原理的MIS觸覺傳感器的種類。
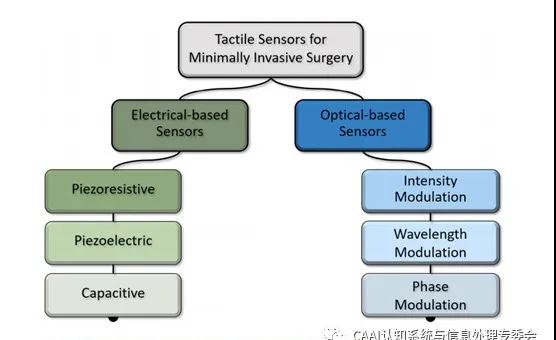
圖1 觸覺傳感器分類
基於電子的觸覺傳感器是目前最常用的MIS傳感方式[6]。電子傳感器可以進一步分類為壓電式、壓阻式和電容式傳感器。雖然電子傳感器滿足了上麵提到的大多數要求,但它既不與MRI兼容,也不是無源的。此外,壓電式傳感器不能測量靜態力。高滯後和缺乏可重複性是這類傳感器的另一個缺點。另一方麵,基於光纖的傳感器具有生物相容性、輕便性和耐腐蝕性。而且光學傳感器是無源的,可在MRI環境下工作[9]。這導致光學傳感器最近廣泛應用於MIS和RMIS[6]。
光學傳感器的工作主要基於三個原理:光強度調製(LIM),相位調製(PM) 和波長調製(WM)[6]。相比之下,基於LIM的傳感器具有價格低廉、對熱不敏感、設計簡單、易於實現等獨特優點,而基於PM和基於WM的傳感器則需要一個相對昂貴的測量係統來計算力和位移等物理參數。基於LIM的傳感器的缺點是,小型化仍然是限製其可擴展性的關鍵問題。這一限製在很大程度上影響了分辨率和測量範圍[10],[11]。
在MIS應用中,觸覺傳感器的設計要求(又稱約束條件)與傳感器的物理和功能特性有關。物理特性主要取決於傳感器的形狀和大小,而功能約束則與傳感器在生物環境中的兼容性、相互作用和性能有關。作為物理約束的一個例子,MIS觸覺傳感器應該是小尺寸和圓柱形的,可在導管的管身或尖端集成。作為功能要求,傳感器應該能夠測量0-5N範圍內的接觸力,分辨率為0.01N [12]。此外,傳感器應相當敏感、線性、低滯後。
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |


