
| 創澤機器人 |
| CHUANGZE ROBOT |
人類與外界的交互,包括認知和改造兩個方麵,前者是後者的前提。對於前者,認知本質上是對時空的直觀。具體說,任何一個外界的事物,都是時間和空間的具體形式體現----可以用一組時間空間參數描述。時空的無窮組合,也便造就了外界的多樣性。對於這些組合的認知,人類有多個通道進行直觀----視覺、聽覺、觸覺、嗅覺、味覺。這種簡潔高效的直觀方式也導致了一個問題:一個人和一個事物之間在時空上存在一定距離,就無法做到多個通道同時直觀,以此限製了人對外界的認知水平。目前,從成熟度看,對五種通道的研究大致有三個梯隊:視覺、聽覺為第一梯隊,我們的模仿已十分成熟----各類商業化的視聽產品;觸覺是第二梯隊,處於成長期;嗅覺、味覺,處於第三梯隊,該方麵的研究相對較少。事實上有研究表明,觸覺是生物體最原始的感覺通道,甚至早於視覺功能進化,直至今日,人類嬰兒探索世界的主要方式仍是觸覺行為。可見,觸覺研究落後的原因不是說不重要,而是不簡單。觸覺研究的困難存在於觸覺實現的各個環節中:觸覺機理複雜、觸覺數據難以獲取、觸覺係統真再現實度低、觸覺應用數量少。本文從觸覺感知機理、觸覺建模及渲染、觸覺再現係統和展望四個方麵展開論述。
1.觸覺感知機理
觸覺作為一個通道,其輸入是觸摸物體時觸覺感受器的空間變化、震動,其輸出是各類感覺,如硬度、形狀、粗糙度、紋理、彈性、濕度、黏性;其實現的方式是通過各種操作,如觸摸、按壓、拿捏、滑動[1]等。目前,關於人體觸覺感知較為成熟的是四通道理論,即人體對外界的觸覺感知由皮膚內的4種機械式刺激感受器共同完成, 包括 Ruffini小體、Meissner小體、Merkel盤和Pacinian小體。4種觸摸感受器所在皮膚組織的位置和對觸覺刺激的響應均不相同, 其中, Ruffini小體感知彈性,Meissner小體感知凸起邊緣, 物體外形、紋理造成的壓力及低頻的振動刺激一般由位於皮膚上皮層和真皮層之間的Merkel小體感知, 而高頻振動刺激則由皮膚最深處的Pacinian小體感知。
2.觸覺建模及渲染
此部分實際上是為了解決這兩個問題:1,如何獲得數據?2,如何對真實表麵的感覺進行描述和數學建模?
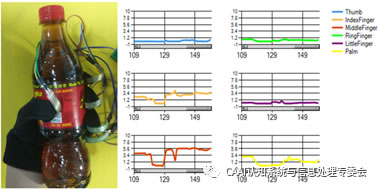
針對問題1,這裏主要涉及兩個方麵:數據采集和數據壓縮。數據采集:數據采集主要是通過各種信號采集設備實現,物體的結構可以通過傳統的三維掃描識別和軟件來實現,但單純的幾何建模無法獲取像觸感等其他物理交互屬性。如清華大學孫富春教授團隊研製的觸覺手套,可以采集人手的指尖與手掌操作過程的觸覺信息[2]。同時觸覺信號的采集往往包含位置、角度、速度、力等多維信息,因此, 在進行觸覺再現的信號建模等處理之前, 需要對采集的原始觸覺數據進行壓縮或降維。
針對問題2,目前建模渲染主要有兩種方式:基於觸覺數據和基於視覺數據。基於觸覺數據:物體材質的觸覺信息包括材質的紋理輪廓、摩擦力、振動信號等, 觸覺再現即是模擬、重建材質表麵觸覺信息的過程。基於真實的觸覺交互數據可以構建物體表麵的紋理或幾何輪廓模型, 或通過參數化建模等方式計算材質表麵的觸覺信號,實現虛擬物體表麵的觸覺再現。基於視覺數據:觸覺數據需要通過專門的采集設備進行收集和處理, 數據獲取要求高, 目前得到的觸覺數據規模小。相比觸覺數據集, 自然圖像和紋理圖像有大量的公開數據集可以獲取, 這些圖像中往往包含豐富的視覺和觸覺特征。基於圖像特征提取的觸覺再現從圖片的灰度、深度等信息獲取圖像中紋理表麵的輪廓和特征, 將圖像幾何信息映射到觸覺信息後實現觸覺渲染。
3.觸覺再現係統
觸覺再現研究目的在於設計出優異的觸覺再現係統以提高人機交互的效率,優異主要體現在:真實的觸覺再現、高效的人機交互和豐富的感知體驗。目前觸覺再現係統按交互形式主要分為觸摸屏係統、觸覺筆係統、可穿戴係統、主動表麵和空氣觸覺係統。如清華大學史元春教授團隊針對現有觸覺圖形顯示器進行交互技術和用戶體驗的研究[3]。其從盲人觸覺這一應用領域入手,對比目前主流的觸摸屏,通過實驗分析了觸摸屏工作方式和點陣幅麵對盲人交互體驗的影響,最終得出了一套觸覺顯示器的交互體驗原則:符合盲人用戶的自身認知、合理使用隱喻、使用場景多樣, 以及成本控製。如在shadow靈巧手操控中,數據手套指尖穿戴振動器,將shadow靈巧手的觸覺反饋給人手,以此增加遙操作機器人的沉浸感。
4.展望
目前的觸覺再現技術可實現的真實感和交互性有限, 複雜感知機理和高開發成本增加了該領域的研究難度。麵對觸覺再現技術的發展現狀, 結合觸覺再現係統的應用需求, 未來觸覺再現技術的突破發展有望從觸覺感知機理、觸覺數據建模、觸覺反饋係統和觸覺交互應用幾個方向共同展開:
(1) 觸覺感知機理的深入思考
由於缺乏係統的方法和多項技術發展阻礙, 尚未有係統且完整的理論表述觸覺感知的各項影響因素。人體觸覺感知機製的研究需要綜合多門學科、從多個角度展開探索。
(2) 觸覺建模算法的不斷探索
觸覺感知會受到神經生理組織、交互方式等多方麵的影響, 準確提取和記錄觸覺交互過程中相關參數, 尋找並構建更精確的觸覺計算模型, 有助於提高觸覺再現信號的準確性和真實度。目前采集的真實觸覺數據量及其可反映的物體觸覺屬性有限, 而且數據在采集、建模、傳輸和再現過程中均有部分觸覺信息損失。未來在觸覺數據的提取和記錄方麵, 需要設計低本、多維度的觸覺數據采集係統, 構建統一的觸覺數據采集和處理標準;在增加觸覺數據采集數量和維度的基礎上, 提升觸覺信號傳輸速率和信息保真率, 降低觸覺數據處理和分析過程中的信息損失。在觸覺數據建模方麵, 針對簡單數學模型無法準確建模的觸覺信號, 基於深度學習技術練 更複雜的網絡模型, 能夠對觸覺數據進行更精確的特征提取和建模處理; 此外, 針對觸覺技術研發 成本高的問題, 通過結合大數據技術建立和發布大規模開放式觸覺數據集, 能夠極大程度地促進虛擬觸覺再現技術的飛躍。
(3) 觸覺再現係統的創新設計
目前, 傳統的觸覺再現係統正在向更多交互維度、更大操作空間等趨勢發展, 然而這些係統依然麵臨著便攜性差、真實感弱、觸覺反饋強度有限、不同維度性能差異大等問題。開發基於移動終端及可穿戴式觸覺再現係統、增加觸覺再現係統的觸覺信息將是觸覺再現技術的重要發展方向之一。
(4) 觸覺交互應用的協同發展
由於觸覺反饋方式和係統的限製, 觸覺交互應用開發成本高, 而觸覺交互係統的增強效果還停留在簡單的振動碰撞模擬, 觸覺再現技術帶來的交互體驗和效率優化價值難以評判。
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |


